
去年年底馬斯克的 FSD V12 全球直播,重新訓(xùn)練的系統(tǒng)完全沒有給這位科技頂流一點(diǎn)面子。
在全球觀眾的見證下,特斯拉試圖闖一次陣仗最大的紅燈,來告訴所有人:端到端自動(dòng)駕駛,其實(shí)沒有那么容易。
「是技術(shù)進(jìn)步,還是一意孤行」,在一個(gè)傳統(tǒng)分模塊的技術(shù)棧面前顯而易見的 Bug 出現(xiàn)了之后,也就有了討論的空間。
但是,好在 FSD V12 并沒有停滯不前,這些討論并不會(huì)傳到技術(shù)開拓者的耳朵里。
FSD V12.3 發(fā)布,馬斯克宣布北美車主可以試用一個(gè)月。
事情開始發(fā)生變化,由「端到端是一條死路」,變成了「路況還是簡(jiǎn)單,有本事到國(guó)內(nèi)來試試」。
進(jìn)入 2024 年,國(guó)內(nèi)廠商突然然開始著手宣傳端到端,各大廠商都有意無意地透露,自己正在這個(gè)方向上押重注。
- 3 月 17 日,在汽車百人會(huì)上,二線智能駕駛廠商元戎啟行突然宣布,元戎啟行是國(guó)內(nèi)第一家能夠?qū)⒍说蕉四P统晒ι宪嚨娜斯ぶ悄芷髽I(yè);
- 4 月 24 日 ADS 2.0 升級(jí)為乾崑 3.0,技術(shù)轉(zhuǎn)向 GOD/PDP 網(wǎng)絡(luò)全新架構(gòu),對(duì)外稱是端到端架構(gòu);
- 5 月 20 日,小鵬汽車舉辦了以「開啟AI智駕時(shí)代」為主題的AI DAY發(fā)布會(huì),宣布端到端大模型已經(jīng)量產(chǎn)上車;
- 5 月 22 日,傳出消息,小米汽車原圖森未來首席科學(xué)家王乃巖即將帶領(lǐng)團(tuán)隊(duì)加入小米汽車,負(fù)責(zé)端到端自動(dòng)駕駛團(tuán)隊(duì),而王乃巖樂于表達(dá),在知乎上也曾多次抨擊端到端自動(dòng)駕駛;
就像 2021 年 BEV 浪潮一樣,各大廠商再次在自動(dòng)駕駛路線上達(dá)成了一致。
那么什么是端到端自動(dòng)駕駛,先進(jìn)在何處,真的能幫助我們獲得更好的自動(dòng)駕駛體驗(yàn)嗎?
01 什么是端到端自動(dòng)駕駛
經(jīng)典的自動(dòng)駕駛系統(tǒng)有著相對(duì)統(tǒng)一的系統(tǒng)架構(gòu):
- 探測(cè)(detection);
- 跟蹤(tracking);
- 靜態(tài)環(huán)境建圖(mapping);
- 高精地圖定位;
- 目標(biāo)物軌跡預(yù)測(cè);
- 本車軌跡規(guī)劃;
- 運(yùn)動(dòng)控制。
幾乎所有的自動(dòng)駕駛系統(tǒng)都離不開這些子系統(tǒng),在常規(guī)的技術(shù)開發(fā)中,這些模塊分別由不同的團(tuán)隊(duì)分擔(dān),各自負(fù)責(zé)自己模塊的結(jié)果輸出。
這樣的好處是,每一個(gè)子系統(tǒng)都能夠有足夠好的可解釋性,在開發(fā)時(shí)能夠獨(dú)立優(yōu)化。
與此同時(shí),為了保證整體自動(dòng)駕駛的性能,每一個(gè)模塊都需要保證給出穩(wěn)定的表現(xiàn)。
如果將這些系統(tǒng)簡(jiǎn)單分為兩部分,可以是感知系統(tǒng)和規(guī)劃控制系統(tǒng):
其實(shí)最主要的特征是:感知得到結(jié)果之后,將結(jié)果傳遞給規(guī)劃控制系統(tǒng)。
為了讓系統(tǒng)表現(xiàn)足夠好,其實(shí)暗含了兩個(gè)條件:
- 感知的結(jié)果足夠正確
- 規(guī)劃控制獲得的信息足夠豐富
很遺憾,這兩條都難以保證,為何?
規(guī)劃控制所有從感知得到的信息,都是感知工程師基于現(xiàn)有的資源定義好的,這里的資源包括:標(biāo)注的能力、獲取相應(yīng)數(shù)據(jù)的能力,甚至工程師們對(duì)駕駛的理解。
舉一個(gè)非常簡(jiǎn)單的例子,一般來說我們開車時(shí)候發(fā)現(xiàn)前車打轉(zhuǎn)向燈,我們會(huì)相對(duì)開始警覺,并且給前車足夠的空間進(jìn)入本車道,但是由于團(tuán)隊(duì)限于資源,并沒有識(shí)別前車轉(zhuǎn)向的信號(hào)。
這個(gè)「前車打開轉(zhuǎn)向燈」的信息,對(duì)于規(guī)劃控制來說,它就是丟失了。
「因此發(fā)現(xiàn)轉(zhuǎn)向燈信號(hào),并且提前做出反應(yīng)」,這個(gè)策略就成了一個(gè)不可能完成的任務(wù)。
這就引出了模塊化自動(dòng)駕駛的弊端:信息的有損傳遞。
下游任務(wù)得到的信息是不充分的,就相當(dāng)于有兩個(gè)駕駛員,其中主駕眼睛被蒙住,只負(fù)責(zé)操作;另一個(gè)坐在副駕駛,由他來告訴主駕駛前方發(fā)生了什么。
而信息的傳遞方式是兩個(gè)駕駛員都能理解的,我們可以稱之為:信息的顯式表達(dá)。
舉個(gè)例子,駕駛的語境中前方目標(biāo)的識(shí)別,就是高度抽象的顯式表達(dá),一輛車被抽象成、速度、位置、尺寸、加速度等。
這種表達(dá)是人為用經(jīng)驗(yàn)抽象出來并且傳遞給下游。
但是「被誤解是表達(dá)者的宿命」,人和人之間的信息傳遞一定是有損的,所以這種開車方式很難達(dá)到非常好的體驗(yàn)。
優(yōu)秀的分模塊系統(tǒng)就相當(dāng)于兩個(gè)駕駛員有了足夠的駕駛默契,但是絕對(duì)不能與一個(gè)有足夠駕駛經(jīng)驗(yàn)的司機(jī)對(duì)比。
既然信息顯示表達(dá)傳遞會(huì)有損耗,那該怎么做?
這里有個(gè)概念是:信息的隱式表達(dá)。
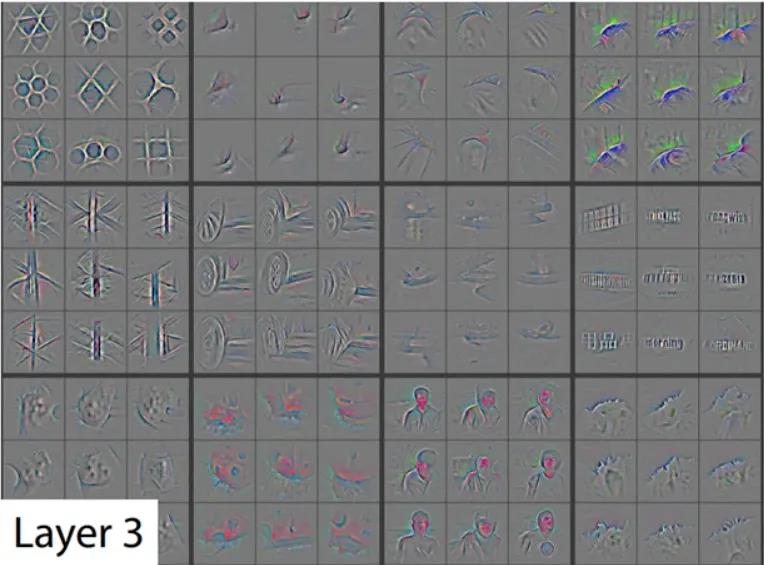
我們常常看到一些論文提到 Feature 層,這是一些信息在神經(jīng)網(wǎng)絡(luò)中的某一層的特征表達(dá),是在訓(xùn)練過程中,網(wǎng)絡(luò)自行學(xué)到的重要信息。但是這些信息不是靠人為定義確定的,我們的經(jīng)驗(yàn)并不能完全理解,但是神經(jīng)網(wǎng)絡(luò)能夠理解,自動(dòng)選擇重要的信息。
回到自動(dòng)駕駛語境中,那就是如果信息的表達(dá)是有損耗的,那么就不表達(dá)了,直接將用神經(jīng)網(wǎng)絡(luò)里的信號(hào)與下游對(duì)接起來。
這其實(shí)就是 CVPR 2023 年 Best Paper UniAD 的思路:分模塊端到端。
分模塊端到端
模塊與模塊之間的信息傳遞不再是開發(fā)工程師能夠直接閱讀并且理解的內(nèi)容,而是直接將幾個(gè)模塊連接起來,然后在訓(xùn)練中進(jìn)行全局優(yōu)化。
由此產(chǎn)生了區(qū)別于傳統(tǒng)自動(dòng)駕駛技術(shù)棧最重要的結(jié)構(gòu)特征:全局可導(dǎo)并且可以全局訓(xùn)練。
UniAD

這里我們簡(jiǎn)單看一下UniAD 的思路,從結(jié)構(gòu)上看,如果不考慮各模塊之間的連接,可能會(huì)認(rèn)為這就是一個(gè)傳統(tǒng)的大力飛磚,所有的模塊都用 Transformer 進(jìn)行改造的系統(tǒng)。因?yàn)橐廊豢梢院苊黠@的看到 BEV freature 層、MapFormer(建圖)、TrackFormer(跟蹤)等模塊。
但是,其實(shí)最重要的改進(jìn)并不是如此,而是各個(gè)模塊之間的連接方式,并不是像我們傳統(tǒng)技術(shù)棧一樣,用初級(jí)工程師甚至駕駛員完全能夠理解的方式進(jìn)行連接的,而是通過神經(jīng)網(wǎng)絡(luò)的方式進(jìn)行連接。
當(dāng)然由于開環(huán)評(píng)測(cè)方式(并不是實(shí)際運(yùn)行結(jié)果,與環(huán)境并沒有交互)過于單一。業(yè)內(nèi)也有學(xué)者對(duì)其提出批評(píng),認(rèn)為由于 UniAD 主要在 Nuscenes 上進(jìn)行開環(huán)評(píng)測(cè),導(dǎo)致大部分的軌跡,模型只要輸出合適的直行命令即可獲得較好的結(jié)果,并且甚至還設(shè)計(jì)了一個(gè)新的模型,將感知結(jié)果完全丟失,只留下自車和周圍車輛的軌跡,也能獲得不錯(cuò)的結(jié)果。
VAD
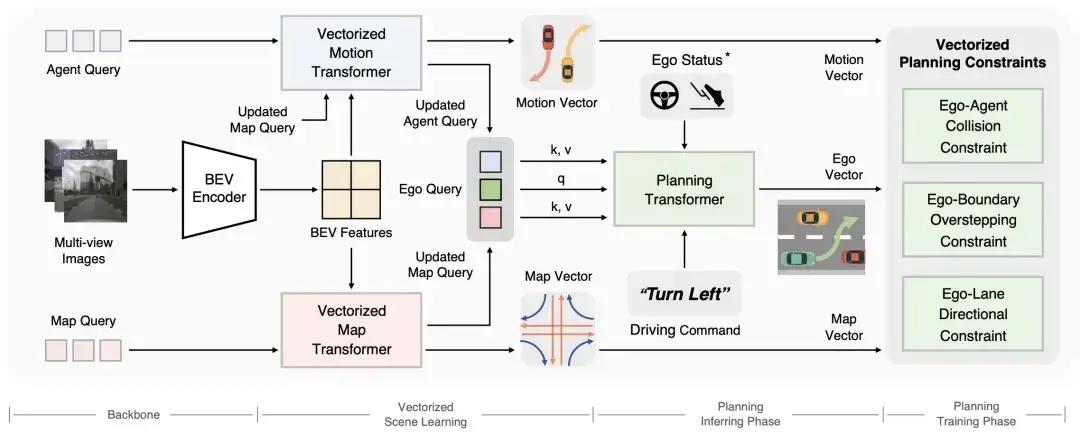
這篇論文發(fā)表在 2023 年的 ECCV 上,相較于 UniAD ,摒棄了傳統(tǒng)技術(shù)棧中的柵格化表征,對(duì)整個(gè)駕駛場(chǎng)景進(jìn)行矢量化建模,同樣與 UniAD 一致,VAD 基于統(tǒng)一的 Transformer 結(jié)構(gòu)。
- 動(dòng)態(tài)目標(biāo)信息由 Vectorized Motion Transformer 提取,實(shí)現(xiàn)動(dòng)態(tài)目標(biāo)檢測(cè)和矢量化的軌跡預(yù)測(cè);
- 靜態(tài)地圖由 Vectorized Map Transformer 提取;
- Planning Transformer 以隱式的動(dòng)靜態(tài)場(chǎng)景特征作為輸入,并且獲得相應(yīng)的規(guī)劃信息。
從結(jié)構(gòu)來看,OCC 的模塊被完全拋棄了。
對(duì)此論文中也有解釋,OCC 的模塊一定程度上作為后處理兜底的任務(wù),具有較大的算力開銷,而 VAD 選擇在訓(xùn)練階段引入更多約束,降低對(duì)后處理兜底的需求。
于此同時(shí),VAD 也在 Carla(一種被學(xué)界廣泛使用的自動(dòng)駕駛模擬器)中進(jìn)行了評(píng)測(cè),也獲得了非常好的結(jié)果。

從這兩篇論文中我們不難看出,學(xué)界對(duì)于端到端自動(dòng)駕駛的態(tài)度應(yīng)該是可連接并且全局可以進(jìn)行共同優(yōu)化訓(xùn)練的端到端,而非一個(gè)完全的純黑盒網(wǎng)絡(luò),還是從原有的自動(dòng)駕駛技術(shù)棧進(jìn)行改進(jìn)而來,這實(shí)際上與大模型無關(guān),也與 nWorld Model 也并沒有產(chǎn)生實(shí)際的聯(lián)系。
那么既然定義清楚了,業(yè)內(nèi)是否都有必要切換呢?切換的難度在什么地方?
02 端到端自動(dòng)駕駛會(huì)帶來什么
全局可導(dǎo)并且全局優(yōu)化是端到端結(jié)構(gòu)上的特點(diǎn),這種特點(diǎn)能帶來什么呢?
「Scaling Law」
這是一個(gè)非常流行的詞匯,從 ChatGPT 3.5 橫空出世,震驚之余人們總結(jié)出來的經(jīng)驗(yàn),通俗的說法即:數(shù)據(jù)驅(qū)動(dòng),大力出奇跡。
這也是 OpenAI 奉為圭臬的開發(fā)準(zhǔn)則,事實(shí)證明這條路確實(shí)能夠產(chǎn)生出來目前最優(yōu)秀的人工智能產(chǎn)品,ChatGPT4、Sora,都遵循這條規(guī)則。
而自動(dòng)駕駛現(xiàn)有的技術(shù)棧每個(gè)模塊之間是不可連接的,每個(gè)模塊之間是靠人為和規(guī)則進(jìn)行連接的,無法完全靠數(shù)據(jù)進(jìn)行全局訓(xùn)練,那么 Scaling Rule 至少在目前在自動(dòng)駕駛界是無效的。
而端到端自動(dòng)駕駛在一定程度上就給了 Scaling Law 發(fā)揮的余地,這符合目前人工智能的大趨勢(shì)。
在傳統(tǒng)的技術(shù)棧解決問題上,不論多么復(fù)雜的 Corner Case 都需要工程師們,用非常抽象的方式將場(chǎng)景描述清楚,收集數(shù)據(jù)然后標(biāo)注,解決問題,然后驗(yàn)證。
但是實(shí)際上場(chǎng)景浩如煙海,很多任務(wù)非常瑣碎,以單點(diǎn)突破的方式幾乎沒有可能完全解決。
所以有些公司的場(chǎng)景待解決庫(kù)里面會(huì)將重點(diǎn)的安全問題先處理,而小頻率的體驗(yàn)問題會(huì)之后處理,而這些小頻率的體驗(yàn)問題,可能就決定了,這個(gè)場(chǎng)景的處理是否類人。
例如,紅綠燈前的減速度是否絲滑,是否是根據(jù)當(dāng)時(shí)的車道線和交通參與者做的實(shí)時(shí)判斷?

6 月 7 日,在上海人工智能實(shí)驗(yàn)室主辦的端到端研討會(huì)上,前段時(shí)間離職加入小米的消息引發(fā)廣泛關(guān)注的王乃巖提出:
端到端可以將很瑣碎的任務(wù),用人類的駕駛習(xí)慣進(jìn)行統(tǒng)一的監(jiān)督,降低開發(fā)成本,與可解釋的傳統(tǒng)技術(shù)棧結(jié)合,可能可以帶領(lǐng)我們走向 L4 甚至 L5。
03 端到端自動(dòng)駕駛的難點(diǎn)
我們都知道神經(jīng)網(wǎng)絡(luò)是黑盒系統(tǒng),目前其實(shí)也沒有辦法去控制神經(jīng)網(wǎng)絡(luò)內(nèi)部發(fā)生了什么,而這天然與自動(dòng)駕駛要求的安全性和可靠性相悖。
在傳統(tǒng)的技術(shù)棧中,如果遇到了一個(gè)問題,是可以通過分模塊的方式找到出問題的部分,例如感知層給的目標(biāo)的位置不對(duì)、規(guī)劃給的軌跡不好。
但是端到端系統(tǒng)這些方式就失效了。
更好的問題歸因優(yōu)化和驗(yàn)證系統(tǒng)迫在眉睫。
如何找到合適的數(shù)據(jù)
我們可以將同樣基本是黑盒的感知系統(tǒng)推廣到整個(gè)自動(dòng)駕駛系統(tǒng)上。
以前感知如果出了問題應(yīng)該怎么做,這里舉一個(gè)非常典型的 Corner Case, 公交車上廣告牌的人形圖案,這個(gè)問題特斯拉、理想都爆出過誤識(shí)別新聞。
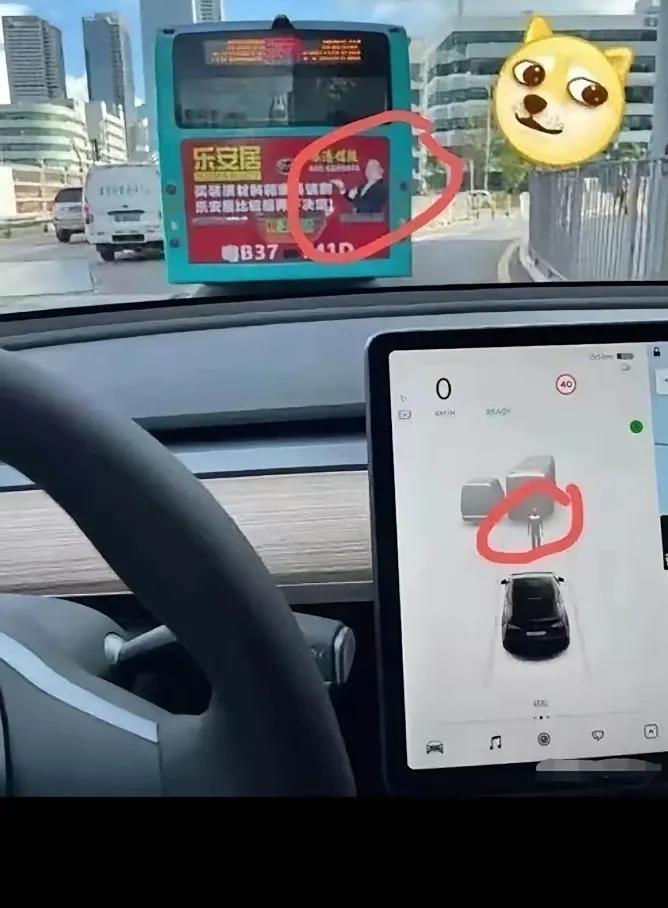
應(yīng)該如何解決這個(gè)問題?
挖掘足夠的的公交車上廣告牌的人形圖案數(shù)據(jù),扔給神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,不斷優(yōu)化感知系統(tǒng),規(guī)劃和控制部分可以保持不變。
那么再進(jìn)一步,已經(jīng)是端到端系統(tǒng)了,如果現(xiàn)在結(jié)果是車輛誤剎。
那么問題的歸因就成了一個(gè)巨大的問題,因?yàn)闆]有辦法馬上知道,是因?yàn)檫@個(gè)人形圖案帶來的 BUG,也就無法去對(duì)應(yīng)尋找數(shù)據(jù)。
即使找到了對(duì)應(yīng)的問題,尋找特定的數(shù)據(jù)也是巨大工程,需要在數(shù)據(jù)閉環(huán)系統(tǒng)中找到相似的人形公交視頻和人類駕駛數(shù)據(jù),再進(jìn)入端到端系統(tǒng)進(jìn)行訓(xùn)練。
那么新的問題又出現(xiàn)了,如何驗(yàn)證問題已經(jīng)修復(fù)并且性能不回退呢?
如何驗(yàn)證端到端自動(dòng)駕駛系統(tǒng)
我們知道傳統(tǒng)的自動(dòng)駕駛技術(shù)棧通過仿真虛擬進(jìn)行大規(guī)模驗(yàn)證得出結(jié)論后,可以上車進(jìn)行實(shí)車測(cè)試。
而這里最重要的區(qū)別是,仿真的驗(yàn)證。
在傳統(tǒng)的技術(shù)棧中,可以將每個(gè)模塊分開來驗(yàn)證的,感知和規(guī)劃可以分別用數(shù)據(jù)在云上大規(guī)模驗(yàn)證,每個(gè)團(tuán)隊(duì)都會(huì)有一個(gè)數(shù)據(jù)庫(kù),每次新系統(tǒng)上線會(huì)將數(shù)據(jù)喂到新系統(tǒng)里面進(jìn)行大規(guī)模驗(yàn)證。
這是之前的經(jīng)驗(yàn)。
但是這里有兩個(gè)問題:
- 大部分團(tuán)隊(duì)的驗(yàn)證方式是開環(huán)驗(yàn)證,也就是并沒有與環(huán)境產(chǎn)生任何交互,只驗(yàn)證輸入和輸出鏈路。
- 大部分團(tuán)隊(duì)對(duì)感知的驗(yàn)證還無法用純虛擬的方式進(jìn)行,需要實(shí)車數(shù)據(jù)才可以完成。
而這與端到端自動(dòng)駕駛是相悖的。
端到端駕駛系統(tǒng)在上車跑之前,必須要用虛擬的方式全局驗(yàn)證通過,否則上車跑通無異于天方夜譚。
那么就涉及到一個(gè)非常好的可以模擬所有感知輸出的自動(dòng)駕駛模擬器,而且能夠在這個(gè)模擬器里面模仿所有的交通參與者的交互信息。
即為了保證系統(tǒng)在真實(shí)世界的安全性,我們需要在虛擬世界中將系統(tǒng)充分驗(yàn)證。
前文提到的 Carla 在一定程度上可以滿足學(xué)界的需求,但是場(chǎng)景的單一和渲染的質(zhì)量,離業(yè)界的要求依然想去甚遠(yuǎn)。

其實(shí)不難看到,端到端自動(dòng)駕駛依然依賴原有的自動(dòng)駕駛開發(fā)工具鏈,優(yōu)秀的數(shù)據(jù)閉環(huán)工具用來收集數(shù)據(jù),優(yōu)秀的自動(dòng)駕駛仿真系統(tǒng)用來驗(yàn)證,而這大部分團(tuán)隊(duì)幾乎都沒有。
從這個(gè)角度來看,端到端自動(dòng)駕駛無法進(jìn)行彎道超車。
寫在最后
雖然著名反 OpenAI 人工智能專家楊樂昆認(rèn)為,現(xiàn)有的 LLM 盡管在自然語言處理、對(duì)話交互、文本創(chuàng)作等領(lǐng)域表現(xiàn)出色,但其仍只是一種「統(tǒng)計(jì)建模」技術(shù)。
通過學(xué)習(xí)數(shù)據(jù)中的統(tǒng)計(jì)規(guī)律來完成相關(guān)任務(wù),本質(zhì)上并非具備真正的「理解」和「推理」能力。
而這個(gè)理論似乎放在端到端自動(dòng)駕駛上也成立,相似的是最近港大的著名學(xué)者馬毅提出:如果相信只靠 Scaling Laws 能實(shí)現(xiàn) AGI,你該改行了。
那么似乎我們也可以說:如果相信只靠端到端就能實(shí)現(xiàn) L5,那么你該改行了。
不過,我們目前看到最有希望的一條路已經(jīng)擺在了我們面前,雖然這條路看不到是否能夠通向終點(diǎn),這條路似乎也沒有那么簡(jiǎn)單,路上充滿了很多不確定性,抵觸的聲音不絕于耳。
但是特斯拉已經(jīng)向我們示范了這條路的巨大潛力。
所以,我們?yōu)槭裁床蝗L試呢?
轉(zhuǎn)自焉知汽車
