
作者 | 北灣南巷
出品 | 汽車(chē)電子與軟件
隨著技術(shù)的不斷進(jìn)步,汽車(chē)制動(dòng)系統(tǒng)也在悄然發(fā)生變革。同馭汽車(chē)與菲格智能科技分別推出的電子機(jī)械制動(dòng)系統(tǒng)及其控制方法,為解決電子機(jī)械制動(dòng)系統(tǒng)存在的精確性和可靠性問(wèn)題提供了參考價(jià)值。
同馭汽車(chē)的電子機(jī)械制動(dòng)系統(tǒng)通過(guò)電機(jī)驅(qū)動(dòng),實(shí)現(xiàn)了制動(dòng)力的精確傳遞和控制,而其雙重冗余設(shè)計(jì)更是將安全性提升到了新的高度。另一方面,菲格智能科技的制動(dòng)控制方案則在制動(dòng)踏板失效的情況下,提供了一種減速方法,確保了車(chē)輛在緊急情況下的安全。這兩項(xiàng)技術(shù)的應(yīng)用,不僅展現(xiàn)了電子制動(dòng)系統(tǒng)在精確性、可靠性和智能化方面的巨大潛力,也預(yù)示著汽車(chē)制動(dòng)技術(shù)向更高效、更安全方向的持續(xù)演進(jìn)。接下來(lái),我們將詳細(xì)剖析這些技術(shù)的核心內(nèi)容,并探討它們對(duì)汽車(chē)制動(dòng)系統(tǒng)未來(lái)發(fā)展的影響。
#01 同馭汽車(chē)—電子機(jī)械制動(dòng)系統(tǒng)及其控制方法
同馭汽車(chē)提供了一種電子機(jī)械制動(dòng)系統(tǒng) (EMB) 及其控制方法(申請(qǐng)?zhí)?202411205388 .9),旨在解決傳統(tǒng)機(jī)械制動(dòng)系統(tǒng)存在的精確性和可靠性問(wèn)題,并提高車(chē)輛的整體制動(dòng)性能和安全性。以下是該專利中的主要知識(shí)點(diǎn),并進(jìn)行更深入的分析:
1.1 技術(shù)背景
EMB 采用電機(jī)作為制動(dòng)力的驅(qū)動(dòng)源,通過(guò)機(jī)械傳動(dòng)機(jī)構(gòu)將電機(jī)的動(dòng)力轉(zhuǎn)化為制動(dòng)力,實(shí)現(xiàn)對(duì)車(chē)輛制動(dòng)盤(pán)或制動(dòng)鼓的夾緊,從而達(dá)到制動(dòng)的目的。
與傳統(tǒng)液壓制動(dòng)系統(tǒng)相比,EMB 具有更高的響應(yīng)速度和更精確的控制能力,可以實(shí)現(xiàn)更高效的能量回收和更優(yōu)化的制動(dòng)性能。
隨著汽車(chē)電子化和智能化的不斷發(fā)展,電子機(jī)械制動(dòng)系統(tǒng)成為高級(jí)駕駛輔助系統(tǒng)(ADAS)和自動(dòng)駕駛系統(tǒng)中的關(guān)鍵組成部分。傳統(tǒng)制動(dòng)系統(tǒng)存在對(duì)夾緊力識(shí)別精準(zhǔn)度低、摩擦襯片磨損難監(jiān)測(cè)等問(wèn)題。現(xiàn)有EMB系統(tǒng)中的夾緊力傳感器價(jià)格昂貴,布置位置面臨挑戰(zhàn),完全取消夾緊力傳感器會(huì)增加夾緊力辨識(shí)的難度。該發(fā)明旨在解決此類(lèi)問(wèn)題,以提高電子制動(dòng)系統(tǒng)的精確性和可靠性。
1.2 發(fā)明目的
該專利發(fā)明的目的是設(shè)計(jì)一種具有高精度控制、快速響應(yīng)和冗余安全功能的電子機(jī)械制動(dòng)系統(tǒng),具體包括以下幾個(gè)目標(biāo):
- 通過(guò)模塊化設(shè)計(jì)實(shí)現(xiàn)制動(dòng)操作的精確控制。
- 監(jiān)測(cè)并識(shí)別摩擦襯片磨損狀況,延長(zhǎng)系統(tǒng)壽命。
- 利用剛度擬合和摩擦識(shí)別實(shí)現(xiàn)對(duì)無(wú)傳感器車(chē)輪的精準(zhǔn)控制,降低硬件成本。
1.3 組成部分
該系統(tǒng)由控制模塊和執(zhí)行模塊組成,執(zhí)行模塊包含主執(zhí)行模塊和次執(zhí)行模塊,實(shí)現(xiàn)了雙重冗余設(shè)計(jì):
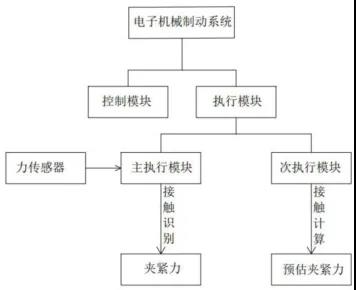
電子機(jī)械制動(dòng)系統(tǒng)控制原理圖
- 主執(zhí)行模塊:包括電機(jī)、力傳感器和減速增扭機(jī)構(gòu),負(fù)責(zé)實(shí)時(shí)測(cè)量夾緊力和轉(zhuǎn)換運(yùn)動(dòng)。
- 次執(zhí)行模塊:負(fù)責(zé)基于主執(zhí)行模塊的夾緊力信息和算法計(jì)算估計(jì)的夾緊力,提供冗余或輔助制動(dòng)。
- 控制模塊:接收指令并控制電機(jī)旋轉(zhuǎn),從而實(shí)現(xiàn)夾緊或釋放操作。
控制模塊:
負(fù)責(zé)發(fā)送操作指令,控制制動(dòng)系統(tǒng)的運(yùn)行。例如,控制模塊可以根據(jù)駕駛者的制動(dòng)踏板信號(hào)或車(chē)輛的行駛狀態(tài)信息,發(fā)送相應(yīng)的夾緊或釋放指令。
控制器:
與電機(jī)位置傳感器、電流傳感器和力傳感器相連,接收控制模塊的指令,并根據(jù)這些傳感器的實(shí)時(shí)信息控制電機(jī)的旋轉(zhuǎn)。
通過(guò)精確控制電機(jī)的旋轉(zhuǎn)角度和電流大小,控制器能夠執(zhí)行精確的夾緊或釋放操作。
控制器可以采用多種控制策略,例如 PID 控制、模糊控制、自適應(yīng)控制等,以實(shí)現(xiàn)最佳的制動(dòng)性能。
執(zhí)行模塊:
主執(zhí)行模塊:
設(shè)置有力傳感器,通過(guò)接觸識(shí)別獲取夾緊力信息。力傳感器可以實(shí)時(shí)測(cè)量制動(dòng)器對(duì)制動(dòng)盤(pán)或制動(dòng)鼓的夾緊力,并將該信息反饋給控制器。
包括電機(jī)及減速增扭機(jī)構(gòu)、運(yùn)動(dòng)轉(zhuǎn)換機(jī)構(gòu)、電機(jī)位置傳感器和電流傳感器。
電機(jī)及減速增扭機(jī)構(gòu)提供必要的夾緊或釋放動(dòng)力,運(yùn)動(dòng)轉(zhuǎn)換機(jī)構(gòu)將旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)換為直線運(yùn)動(dòng),實(shí)現(xiàn)制動(dòng)操作。
電機(jī)位置傳感器和電流傳感器提供實(shí)時(shí)反饋,使控制器能夠精確控制電機(jī)的旋轉(zhuǎn)角度和電流大小。
次執(zhí)行模塊:
通過(guò)接觸計(jì)算獲取預(yù)估的夾緊力,提供冗余或輔助制動(dòng)。次執(zhí)行模塊可以根據(jù)主執(zhí)行模塊的夾緊力數(shù)據(jù)和/或其他相關(guān)參數(shù),通過(guò)預(yù)設(shè)的算法計(jì)算并預(yù)估夾緊力。
1.4 電子機(jī)械制動(dòng)系統(tǒng)控制方法
控制目標(biāo):
實(shí)現(xiàn)夾緊力的精確控制和摩擦襯片磨損情況的有效監(jiān)測(cè)。
避免因摩擦襯片磨損導(dǎo)致夾緊力誤差,影響制動(dòng)性能和安全性。
1.5 具體實(shí)施控制方案
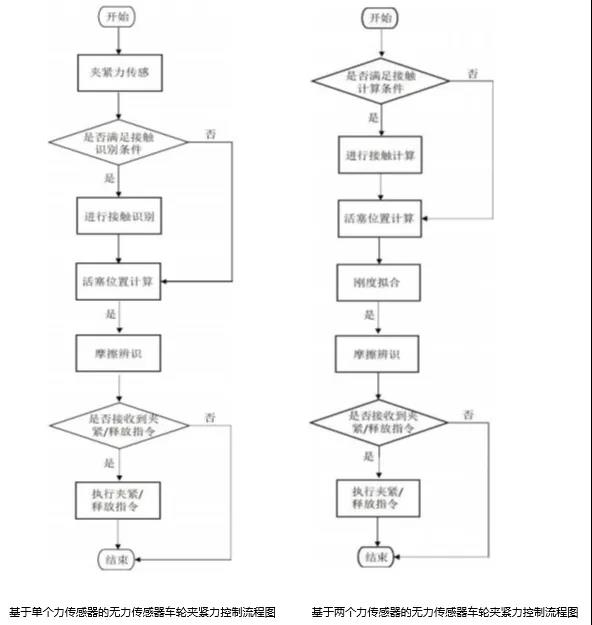
基于單個(gè)力傳感器:
判斷是否滿足觸發(fā)接觸計(jì)算的條件,若滿足,則獲取車(chē)輛參數(shù)信息,進(jìn)行接觸計(jì)算和活塞位置計(jì)算,再進(jìn)行剛度擬合和摩擦識(shí)別,最后執(zhí)行夾緊/釋放指令;若不滿足,則直接進(jìn)行活塞位置計(jì)算、剛度擬合、摩擦識(shí)別和夾緊/釋放指令。
該方法通過(guò)單個(gè)力傳感器實(shí)現(xiàn)了對(duì)無(wú)力傳感器車(chē)輪的有效控制和監(jiān)測(cè),降低了成本,提高了制動(dòng)系統(tǒng)的可靠性和安全性。
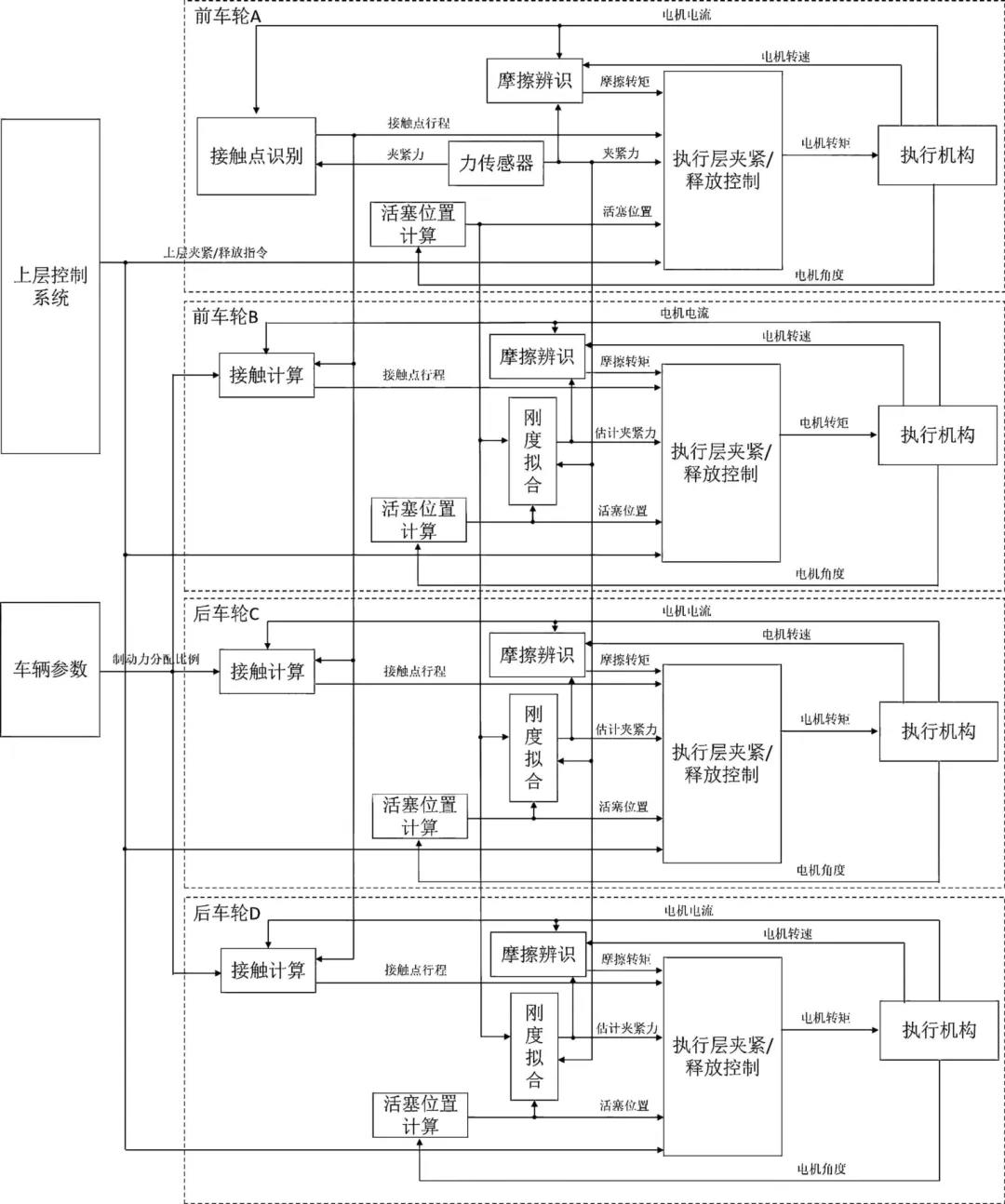
基于單個(gè)力傳感器的四車(chē)輪整體夾緊力控制流程圖
該方法結(jié)合了車(chē)輛參數(shù)和電機(jī)狀態(tài)信息,提高了估計(jì)夾緊力的準(zhǔn)確性,為車(chē)輛制動(dòng)系統(tǒng)的智能控制提供了有力支持。
基于兩個(gè)力傳感器:
與基于單個(gè)力傳感器的控制方法類(lèi)似,但增加了一個(gè)力傳感器,可以更準(zhǔn)確地估計(jì)夾緊力。
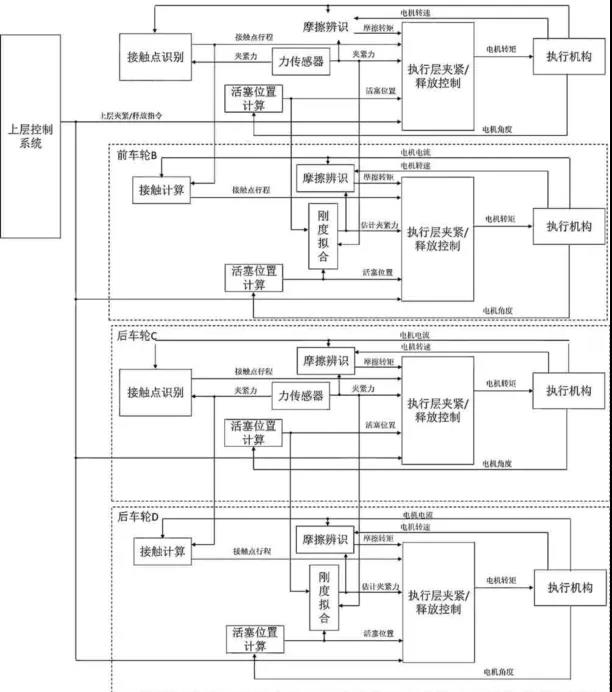
基于兩個(gè)力傳感器的四車(chē)輪整體夾緊力控制流程圖
該方法可以進(jìn)一步提高制動(dòng)系統(tǒng)的性能和可靠性,并更好地適應(yīng)不同的車(chē)輛參數(shù)和行駛條件。
1.6 關(guān)鍵技術(shù)模塊
1. 接觸識(shí)別與接觸計(jì)算:基于電機(jī)電流變化,更新活塞接觸點(diǎn)行程以監(jiān)測(cè)摩擦襯片磨損狀況。
2. 剛度擬合:通過(guò)有力傳感器車(chē)輪的夾緊力和活塞位置信息,在無(wú)力傳感器車(chē)輪上進(jìn)行夾緊力估計(jì)。
3. 摩擦識(shí)別與補(bǔ)償:通過(guò)電機(jī)轉(zhuǎn)速、電機(jī)電流和估計(jì)夾緊力控制摩擦補(bǔ)償,提高系統(tǒng)穩(wěn)定性和準(zhǔn)確性。
1.7 具體控制方法
該系統(tǒng)的控制方法包括獲取車(chē)輛參數(shù)、進(jìn)行接觸計(jì)算、夾緊力估算和摩擦識(shí)別等步驟,通過(guò)如下幾種不同的控制策略實(shí)現(xiàn)制動(dòng)操作的優(yōu)化:
有力傳感器車(chē)輪:
通過(guò)力傳感器獲取夾緊力信息,并更新活塞的接觸點(diǎn)行程,計(jì)算活塞位置。
接觸識(shí)別:通過(guò)力傳感器得到的夾緊力變化情況和電機(jī)電流變化情況,更新活塞的接觸點(diǎn)行程,以此判斷摩擦襯片的磨損情況,實(shí)現(xiàn)摩擦襯片的自適應(yīng)補(bǔ)償。
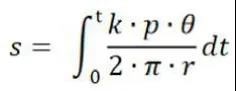
活塞位置計(jì)算:通過(guò)電機(jī)位置傳感器實(shí)時(shí)傳感的電機(jī)角度,再根據(jù)執(zhí)行機(jī)構(gòu)參數(shù)進(jìn)行積分獲得活塞位置。
有力傳感器的方案又分為:
1. 單力傳感器控制:在一個(gè)車(chē)輪上安裝力傳感器,其他車(chē)輪通過(guò)剛度擬合獲取夾緊力估計(jì),實(shí)現(xiàn)全車(chē)監(jiān)控。
2.雙力傳感器控制:在兩個(gè)車(chē)輪上安裝力傳感器,并通過(guò)剛度擬合進(jìn)一步提高無(wú)力傳感器車(chē)輪的控制精度。
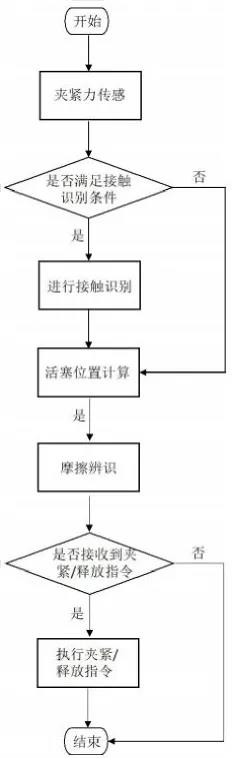
基于單個(gè)或兩個(gè)有力傳感器的車(chē)輪夾緊力控制流程圖
無(wú)力傳感器車(chē)輪:
通過(guò)車(chē)輛參數(shù)和電機(jī)電流進(jìn)行接觸計(jì)算,得到活塞位置信息,并通過(guò)剛度擬合估計(jì)夾緊力。
接觸計(jì)算:根據(jù)有力傳感器車(chē)輪中接觸點(diǎn)識(shí)別模塊得到的接觸點(diǎn)行程,結(jié)合該車(chē)輪執(zhí)行機(jī)構(gòu)的電機(jī)電流變化情況,更新活塞的接觸點(diǎn)行程,以此判斷摩擦襯片的磨損情況,實(shí)現(xiàn)摩擦襯片的自適應(yīng)補(bǔ)償。 剛度擬合:接收有力傳感器車(chē)輪的夾緊力和活塞位置信息進(jìn)行剛度擬合,得到夾緊力與活塞位置之間的函數(shù)關(guān)系,再根據(jù)未設(shè)置力傳感器車(chē)輪的活塞位置信息,通過(guò)該函數(shù)關(guān)系計(jì)算得到估計(jì)夾緊力。 摩擦識(shí)別:通過(guò)電機(jī)電流、電機(jī)轉(zhuǎn)速和估計(jì)夾緊力辨識(shí)摩擦補(bǔ)償,控制所需的摩擦轉(zhuǎn)矩。
摩擦補(bǔ)償:通過(guò)實(shí)時(shí)辨識(shí)和補(bǔ)償摩擦影響,可以減小預(yù)估夾緊力與實(shí)際夾緊力之間的偏差,提高制動(dòng)的準(zhǔn)確性。
摩擦補(bǔ)償有助于消除因摩擦不確定性導(dǎo)致的制動(dòng)波動(dòng)和抖動(dòng)現(xiàn)象,提高制動(dòng)的平穩(wěn)性和穩(wěn)定性。
精確的摩擦控制和補(bǔ)償可以減少制動(dòng)部件的磨損和損壞風(fēng)險(xiǎn),從而延長(zhǎng)整個(gè)制動(dòng)系統(tǒng)的使用壽命。
1.8 優(yōu)勢(shì)
精確控制:通過(guò)優(yōu)化傳感器布置和夾緊力辨識(shí)方法,實(shí)現(xiàn)夾緊力的精確控制和摩擦襯片磨損情況的有效監(jiān)測(cè)。
提高性能和可靠性: 主執(zhí)行模塊和次執(zhí)行模塊的雙重設(shè)計(jì),提高了制動(dòng)系統(tǒng)的準(zhǔn)確性和可靠性。
降低成本: 僅在部分車(chē)輪上設(shè)置力傳感器,降低了系統(tǒng)復(fù)雜性和成本。
增強(qiáng)安全性: 精確控制每個(gè)車(chē)輪的夾緊力,實(shí)現(xiàn)了車(chē)輛制動(dòng)力的合理分配,提升了車(chē)輛的整體制動(dòng)性能和安全性。
1.9 應(yīng)用前景
該電子機(jī)械制動(dòng)系統(tǒng)及其控制方法可以應(yīng)用于各種車(chē)輛,包括汽車(chē)、卡車(chē)、摩托車(chē)等,提高車(chē)輛的整體制動(dòng)性能和安全性。
隨著汽車(chē)電子化和智能化的發(fā)展,EMB 系統(tǒng)將逐漸成為未來(lái)汽車(chē)制動(dòng)系統(tǒng)的重要發(fā)展方向。
1.10 未來(lái)發(fā)展方向
進(jìn)一步優(yōu)化控制算法: 開(kāi)發(fā)更先進(jìn)的控制算法,例如基于人工智能的控制算法,以進(jìn)一步提高制動(dòng)系統(tǒng)的性能和可靠性。
集成更多傳感器: 例如,集成輪速傳感器、加速度傳感器等,以獲取更全面的車(chē)輛狀態(tài)信息,并進(jìn)一步提高制動(dòng)系統(tǒng)的控制精度。
開(kāi)發(fā)更先進(jìn)的摩擦模型: 建立更精確的摩擦模型,以更準(zhǔn)確地描述摩擦襯片與制動(dòng)盤(pán)之間的摩擦特性,并進(jìn)一步提高制動(dòng)系統(tǒng)的控制精度。
總結(jié):
同馭汽車(chē)提供了一種先進(jìn)的電子機(jī)械制動(dòng)系統(tǒng)及其控制方法,該系統(tǒng)具有精確控制、高可靠性、低成本和增強(qiáng)安全性等優(yōu)點(diǎn),具有廣闊的應(yīng)用前景。
