
摘要:隨著汽車各項功能和性能要求的提升,汽車分布式電氣架構(gòu)已不能適應(yīng)市場需求,汽車正在從電子控制單元(ECU)分布式電氣架構(gòu)向域集中式電氣架構(gòu)轉(zhuǎn)變。文章對當(dāng)前的車身域控制器設(shè)計方案進(jìn)行研究總結(jié),結(jié)合當(dāng)前的市場需求,分析采用域控制器方案的諸多優(yōu)點(diǎn)。并設(shè)計了一種車身域控制器,基于實(shí)車功能需求進(jìn)行了車身域控制器的方案設(shè)計,通過臺架以及搭載實(shí)車進(jìn)行功能測試,驗證了方案的可行性,為該方案的量產(chǎn)奠定基礎(chǔ)。
在汽車智能化、網(wǎng)聯(lián)化、軟件定義汽車的發(fā)展趨勢下,分布式電氣架構(gòu)日益暴露諸多問題。目前車上載有大量以線束連接的電子控制單元(Electronic Control Unit, ECU),不同功能分布在不同ECU中,而汽車電子軟件爆炸式增長,大量新功能要求多ECU協(xié)同實(shí)現(xiàn),ECU之間進(jìn)行通信的線束復(fù)雜度、通信負(fù)荷、維修難度都在成倍增長。在此背景下,如何保證功能正常實(shí)現(xiàn)、數(shù)據(jù)及時響應(yīng)以及網(wǎng)絡(luò)安全成為焦點(diǎn)[1]。
為解決分布式電氣架構(gòu)的問題,人們開始逐漸把很多功能相近或關(guān)聯(lián)程度較高的上下游ECU集成整合到高算力的多核中央計算平臺中,即汽車域控制器。域控制器的出現(xiàn)標(biāo)志著汽車電氣架構(gòu)從分布式到域集中式轉(zhuǎn)變。人們一般將域控制器分為五域:座艙域、動力域、車身域、底盤域和自動駕駛域。
域控制器主要由處理器、操作系統(tǒng)和應(yīng)用軟件三部分組成,集成分布式電氣架構(gòu)的ECU核心功能,處理域內(nèi)部的功能邏輯和信號路由,并提供標(biāo)準(zhǔn)化接口用于數(shù)據(jù)交互。一方面提高系統(tǒng)功能集成度;另一方面降低了車載控制器的開發(fā)和制造成本[2]。
1 域控制器集成化架構(gòu)的優(yōu)點(diǎn)
采用域控制器,具有很多優(yōu)點(diǎn),本文針對汽車域控制器的優(yōu)勢展開論述。
1.1 輕量化
對于分布式電氣架構(gòu),各ECU集成一個或多個功能,各ECU相互獨(dú)立,并通過線束連接。當(dāng)汽車有新增新功能需求時,有時需增加新ECU和對應(yīng)線束,如此往復(fù),汽車的ECU數(shù)量急速增加,通過不斷增加ECU數(shù)量為汽車增加新功能的方法已經(jīng)達(dá)到了極限。復(fù)雜的ECU帶來不只是是龐雜的邏輯控制,還帶來錯綜交互的線束設(shè)計和控制器設(shè)計,現(xiàn)代汽車的線束和控制器已成為汽車中僅次于發(fā)動機(jī)的第二重的部件,對于汽車的輕量化要求非常不利。而域控制器的出現(xiàn),則滿足了汽車集成化的發(fā)展需要,大大簡化了汽車電子結(jié)構(gòu),優(yōu)化整車電子電器線路設(shè)計,降低了汽車電子部件和線束重量,有利于汽車的輕量化設(shè)計,提高汽車行駛效率[3]。
1.2 高速數(shù)據(jù)處理
現(xiàn)代汽車具備環(huán)境感知能力,為此需接受和及時處理來自各傳感器、外界其他車輛或基礎(chǔ)設(shè)施的大量數(shù)據(jù),且為保證行車安全,車載控制器必須能夠以實(shí)時或非常接近實(shí)時的速度進(jìn)行處理這類數(shù)據(jù)。而分布式架構(gòu)中,數(shù)據(jù)需要在不同ECU間進(jìn)行反復(fù)通信和運(yùn)算,數(shù)據(jù)延遲性高,運(yùn)算效率低,無法滿足車輛行駛過程中的安全性要求。而域控制器具備高性能的計算能力和高帶寬的網(wǎng)絡(luò)通信,可以對大量數(shù)據(jù)實(shí)時處理并及時傳遞處理結(jié)果。
1.3 復(fù)雜軟件算法集成化
隨著汽車對娛樂、網(wǎng)聯(lián)、安全等復(fù)雜功能需求的快速增加,軟件水平愈發(fā)成為智能汽車的核心競爭力,在未來,智能汽車的軟件代碼量將達(dá)到3億至5億行。汽車軟件的代碼量正在成指數(shù)級別的增加,由于軟件算法不斷累加,未來汽車必須擁有更高的運(yùn)算與邏輯處理能力,為了實(shí)現(xiàn)這些目標(biāo),需要更高的計算能力、嵌入式內(nèi)存容量和連接帶寬,而只有使用域控制器才能滿足所需的硬件要求[4]。
1.4 迭代化
空中下載技術(shù)(Over The Air Technology, OTA)是對汽車軟硬件功能的一種遠(yuǎn)程升級技術(shù),隨著汽車的智能化發(fā)展,用戶希望汽車能夠擁有像智能手機(jī)、平板一樣具備升級能力,而非整個使用周期中功能和特性基本保持不變。對于分布式架構(gòu)設(shè)計的傳統(tǒng)汽車,其所有功能都必須在車輛量產(chǎn)前設(shè)計和實(shí)現(xiàn),無法滿足用戶對汽車功能快速更新的需求。而域控制器算力可進(jìn)行擴(kuò)展,軟硬件分離使得汽車的軟件功能獨(dú)立于硬件,在不增加額外ECU的前提下,僅通過OTA對軟件算法更新即可實(shí)現(xiàn)汽車功能發(fā)展升級,大大提高了系統(tǒng)功能的可擴(kuò)展性和更新的便捷性,使得用戶體驗不斷迭代升級的功能。
1.5 生產(chǎn)成本
對于分布式架構(gòu)的傳統(tǒng)汽車,一旦涉及新功能的增加,所增加的專用微控制單元(Micro Controller Unit, MCU)、存儲器、電源、印制電路板(Printed Circuit Board, PCB)和其他電子元件將大大增加生產(chǎn)制造的成本。而對于集成化的域控制器,進(jìn)行功能迭代的成本會小得多,且隨著技術(shù)進(jìn)步和域控制器的大規(guī)模量產(chǎn),車載系統(tǒng)級芯片(System On Chip, SOC)的價格持續(xù)下降,越來越接近傳統(tǒng)MCU的價格,汽車的生產(chǎn)成本將會進(jìn)一步降低。
2 車身域控制器的設(shè)計
2.1 方案需求分析
車身控制系統(tǒng)包括車身域控制器、智能鑰匙、射頻接收器、胎壓傳感器、天線等部件。
天線由車身域控制器進(jìn)行驅(qū)動,發(fā)送低頻信號給鑰匙,鑰匙發(fā)送高頻信號給射頻接收器。
射頻接收器主要接收鑰匙或胎壓傳感器高頻信號,和車身域控制器之間通過控制器局域網(wǎng)(Controller Area Network, CAN)進(jìn)行通信。
車身域控制器作為車身控制系統(tǒng)的中心模塊,主要負(fù)責(zé)智能進(jìn)入、智能啟動、門鎖控制、胎壓監(jiān)測、內(nèi)部燈光、外部燈光、電源管理、雨刮噴水、后風(fēng)窗加熱、加油/充電口蓋、遠(yuǎn)程控制等功能,具體系統(tǒng)框圖如圖1所示。
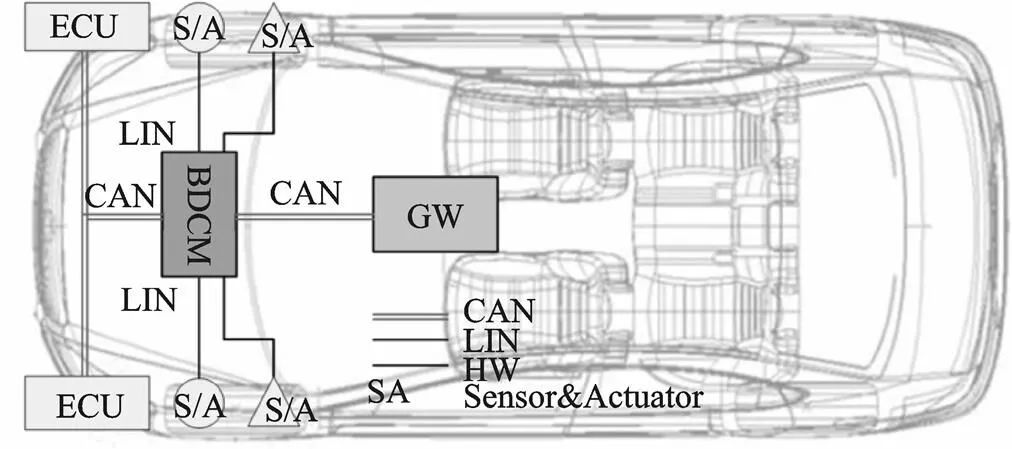
圖1 系統(tǒng)框圖
本文根據(jù)以上功能實(shí)現(xiàn)作為方案需求,編制車身域控制器設(shè)計任務(wù)書,并輸出功能設(shè)計文檔,基于任務(wù)書、功能設(shè)計文檔等進(jìn)行車身域控制器的硬件和軟件設(shè)計。
2.2 硬件選型與設(shè)計
2.2.1硬件選型
首先進(jìn)行硬件選型,根據(jù)輸入/輸出(I/O)資源需求、軟件內(nèi)存需求、外設(shè)資源需求選用恩智浦的S32K芯片作為主芯片。綜合考慮功能需求、性能要求、開關(guān)采集、驅(qū)動、芯片手冊、尺寸、成本、電性能、電磁兼容(Electro Magnetic Compa- tibility, EMC)要求等,依次選取電源芯片、開關(guān)采集芯片、橋驅(qū)芯片、高低驅(qū)芯片、射頻驅(qū)動芯片等硬件資源
2.2.2硬件設(shè)計
基于硬件選型進(jìn)行硬件方案設(shè)計,根據(jù)功能設(shè)計各引腳電路,某電源采集電路的硬件原理如圖2所示。
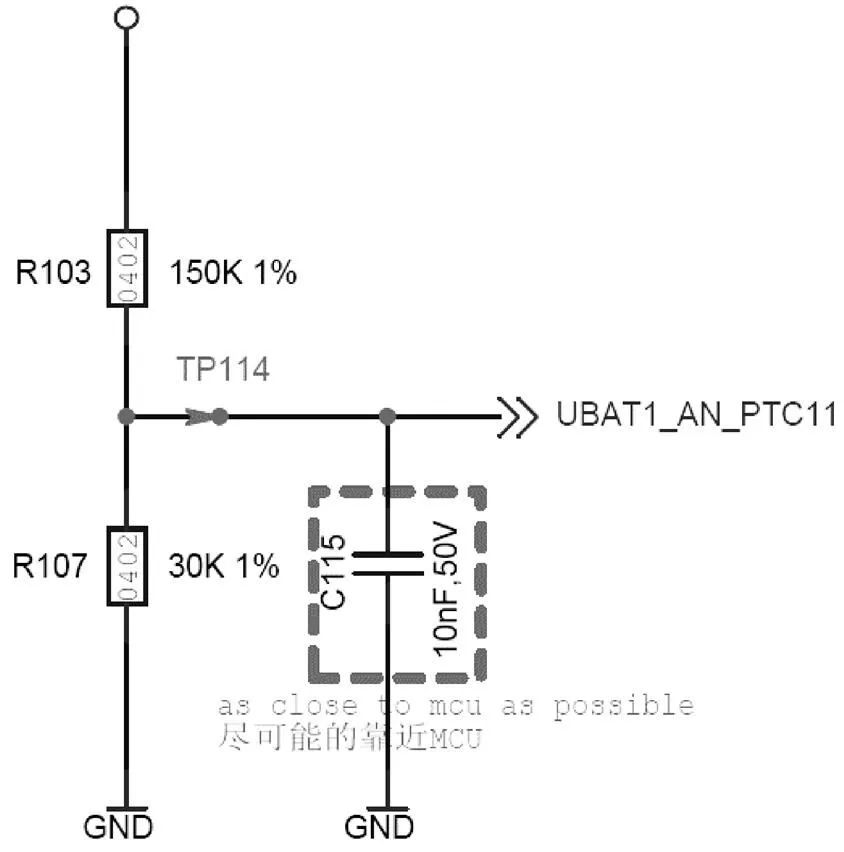
圖2 電源采集電路
結(jié)合各模塊的硬件原理圖進(jìn)行PCB板設(shè)計,最終輸出的車身域控制器系統(tǒng)電氣原理如圖3所示(部分)。
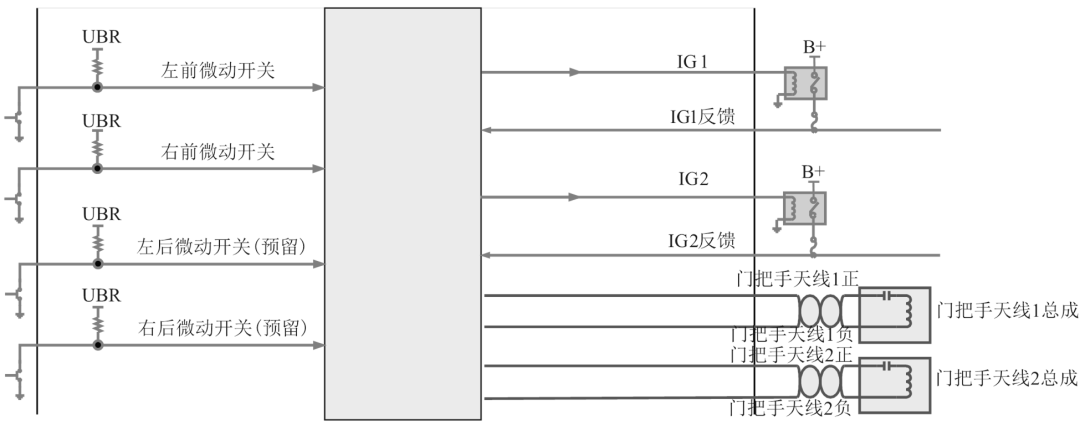
圖3 車身域控制器系統(tǒng)原理圖(部分)
2.3 軟件設(shè)計
根據(jù)功能需求、硬件方案、通信規(guī)范與矩陣、診斷規(guī)范等輸入文件進(jìn)行軟件設(shè)計。首先進(jìn)行軟件架構(gòu)設(shè)計,軟件架構(gòu)采用汽車開放系統(tǒng)架構(gòu)(Automotive Open System Architecture, AUTO- SAR),包括引導(dǎo)加載程序(Bootloader)、應(yīng)用層軟件(App)、實(shí)時環(huán)境(Run Time Environment, RTE)、底層驅(qū)動抽象(ECU abstraction)、服務(wù)層(Service)和微控制器抽象層(Micro Controller Abstraction Layer, MCAL)模塊,軟件總體架構(gòu)如圖4所示。
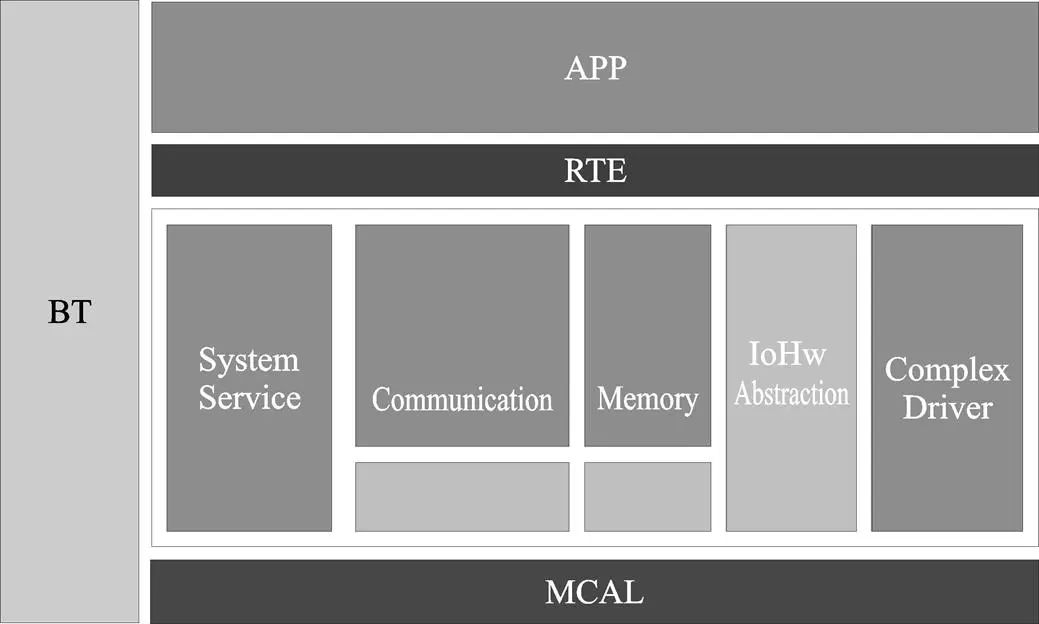
圖4 軟件總體架構(gòu)
應(yīng)用軟件采用AUTOSAR架構(gòu),架構(gòu)設(shè)計使用EAS工具。軟件架構(gòu)如圖5所示。
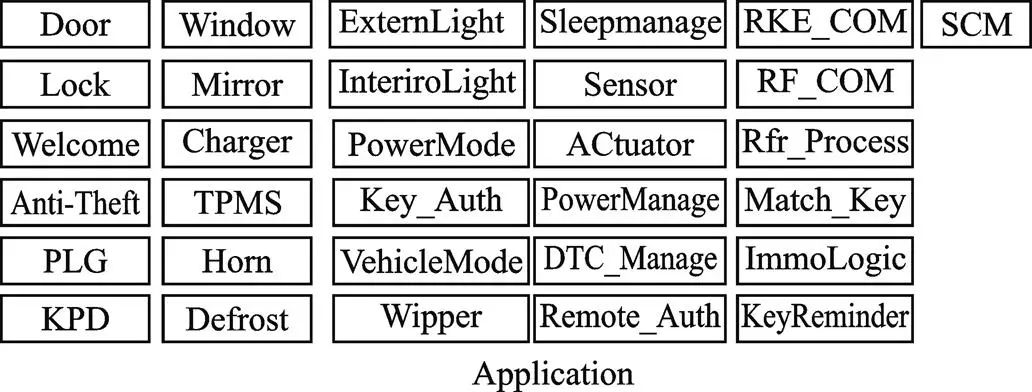
圖5 應(yīng)用軟件架構(gòu)
基礎(chǔ)軟件層(Basic Soft Ware, BSW)采用AUTOSAR架構(gòu),配置工具使用EAS。軟件架構(gòu)如圖6所示。
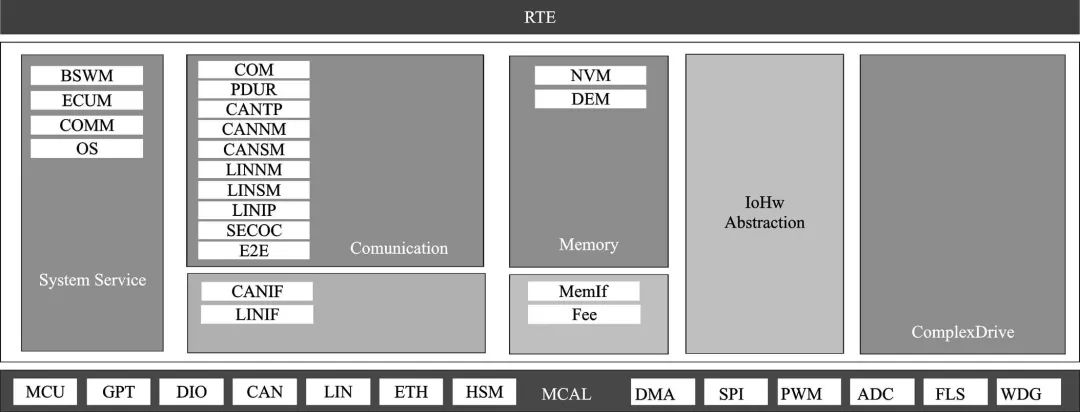
圖6 BSW軟件架構(gòu)
對應(yīng)模塊完成后,進(jìn)行底層軟件配置,確定軟件接口、參數(shù),建立各功能模塊的App應(yīng)用模型,部分模型如圖7所示。
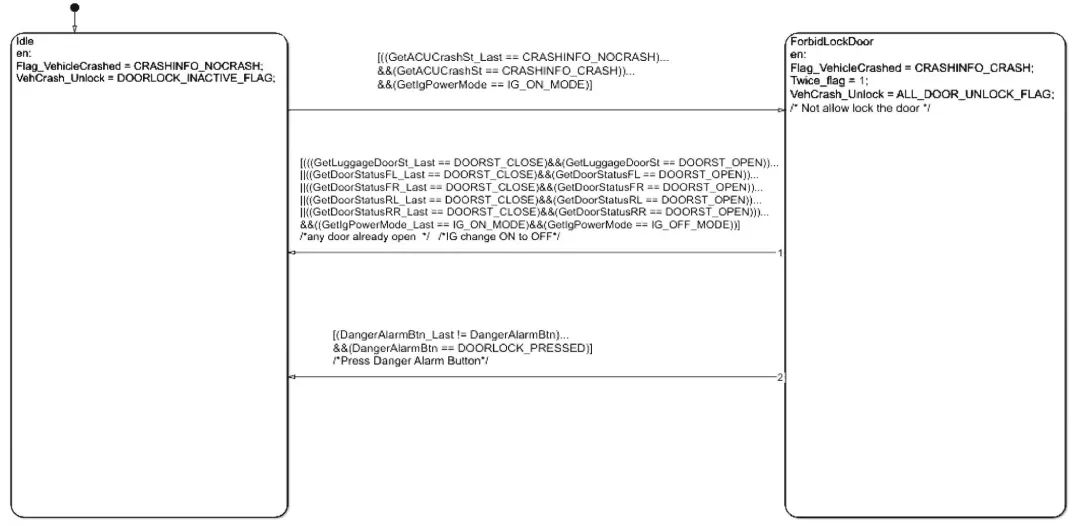
圖7 應(yīng)用層功能模塊
最后,對軟件進(jìn)行系統(tǒng)集成、刷寫,并開展測試工作。
3 車身域控制器的測試驗證
3.1 臺架驗證
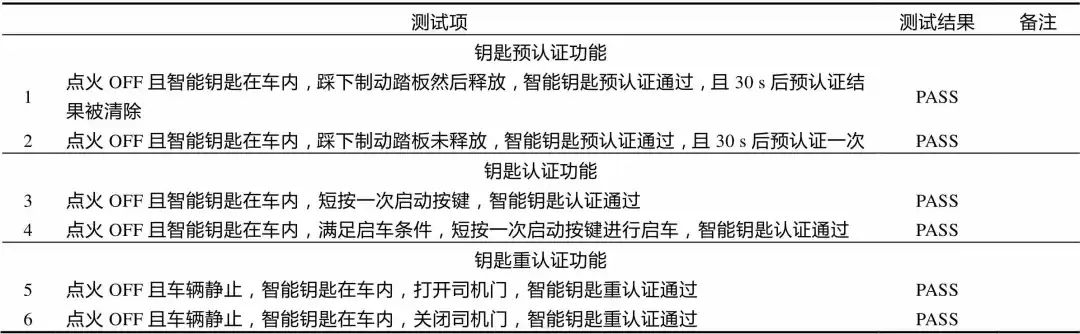
按照臺架測試用例,進(jìn)行臺架功能、網(wǎng)絡(luò)、診斷、刷寫測試,最終通過測試并出具測試報告,部分測試報告內(nèi)容如圖8所示。
3.2 實(shí)車驗證
按照測試用例,進(jìn)行實(shí)車功能測試。將設(shè)計的車身域控制器搭載到某量產(chǎn)車型上(圖8),基于原車環(huán)境進(jìn)行實(shí)車功能驗證,共測試用例820條,最終通過820條,設(shè)計功能全部實(shí)現(xiàn)。

圖8 實(shí)車測試
表1 系統(tǒng)測試報告
4 結(jié)論
本文對目前流行的車身域控制器設(shè)計方案進(jìn)行總結(jié)歸納,分析了相對于分布式架構(gòu),采用域控方案帶來的諸多優(yōu)點(diǎn),并基于新架構(gòu)設(shè)計了一種車身域控制器方案,基于某量產(chǎn)車實(shí)車需求,按照項目實(shí)際開發(fā)流程,經(jīng)過硬件設(shè)計、軟件設(shè)計,生產(chǎn)出滿足需求的車身域控制器樣件,并經(jīng)過臺架和實(shí)車測試,驗證了方案可行性,為方案的最終量產(chǎn)奠定基礎(chǔ)。
轉(zhuǎn)自智能汽車設(shè)計
